-

- 关于遨博
-
产品中心
-
遨博协作机器人具有3-35KG不同负载能力,可覆盖各行业差异性应用,丰富的配置选择能够实现快速适配各种行业应用场景的需求,是提升生产效率、低成本运作的理想选择。
了解更多+
-
遨博iS系列高性能协作机器人,共有iS7、iS10、iS20、iS25、iS35五款产品,分别可负载7kg、10kg、20kg、25kg、35kg,可广泛应用于全行业场景,更适用于精密制造、喷涂、严苛敏感环境等特殊场景,安全便捷。
了解更多+
-
遨博iH系列协作机器人具有3-16kg不同负载能力,末端可自主搭配不同配件,在精度、速度、稳定性方面都有更佳的表现,可覆盖各行业差异性应用,更好地满足客户与市场需求。
了解更多+
-
遨博i系列协作机器人具有3-20KG不同负载能力,可覆盖各行业差异性应用,丰富的配置选择能够实现快速适配各种行业应用场景的需求,是提升生产效率、低成本运作的理想选择。
了解更多+
-
遨博C系列是一款基于服务、新零售等行业应用特点而开发的协作机器人,目前主推C5型号,最大可负载5kg,可满足服务、新零售等领域需求,性价比高、投资回报快。
了解更多+
-
遨博E系列协作机器人是专门面向教育行业教学实训、科研创新的产品。产品配有机器人系列教材、专业课程、实训项目等丰富教学资源,可支持院校机器人专业建设、人才培养、科研创新、技能培训与认证等多种校企产教融合服务合作。
了解更多+
-
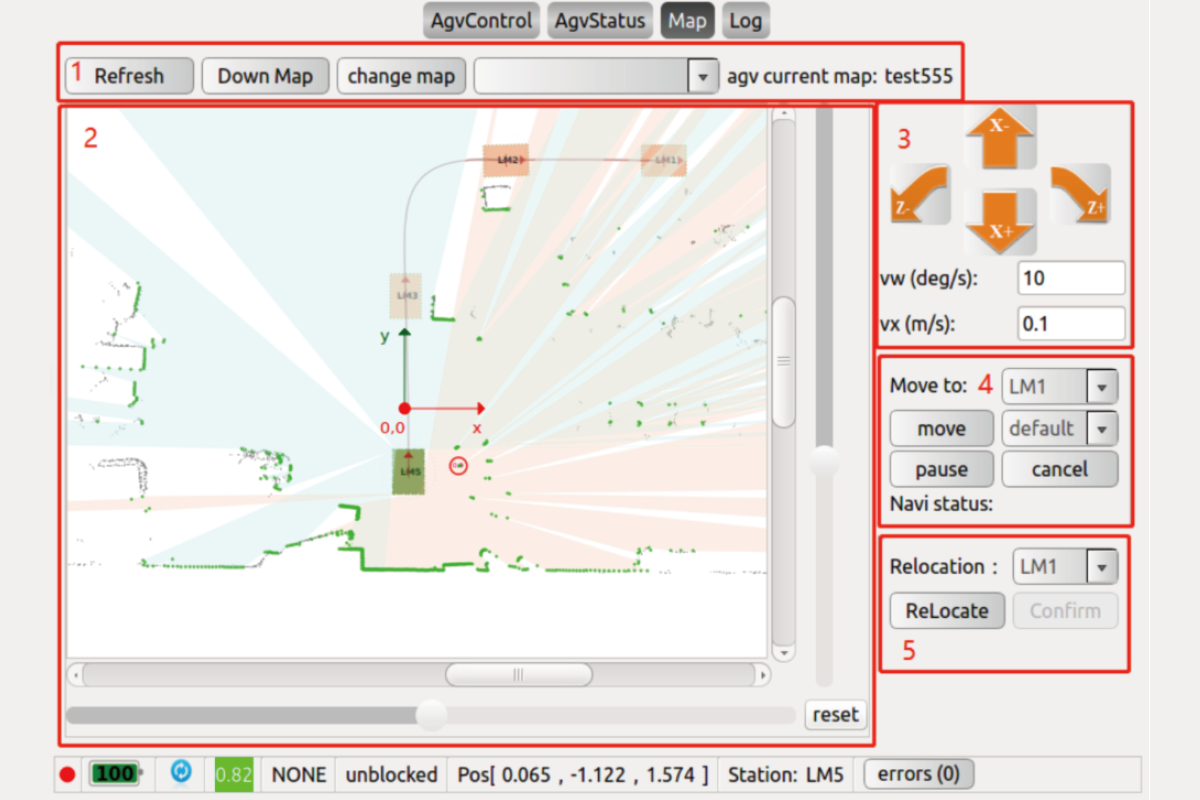
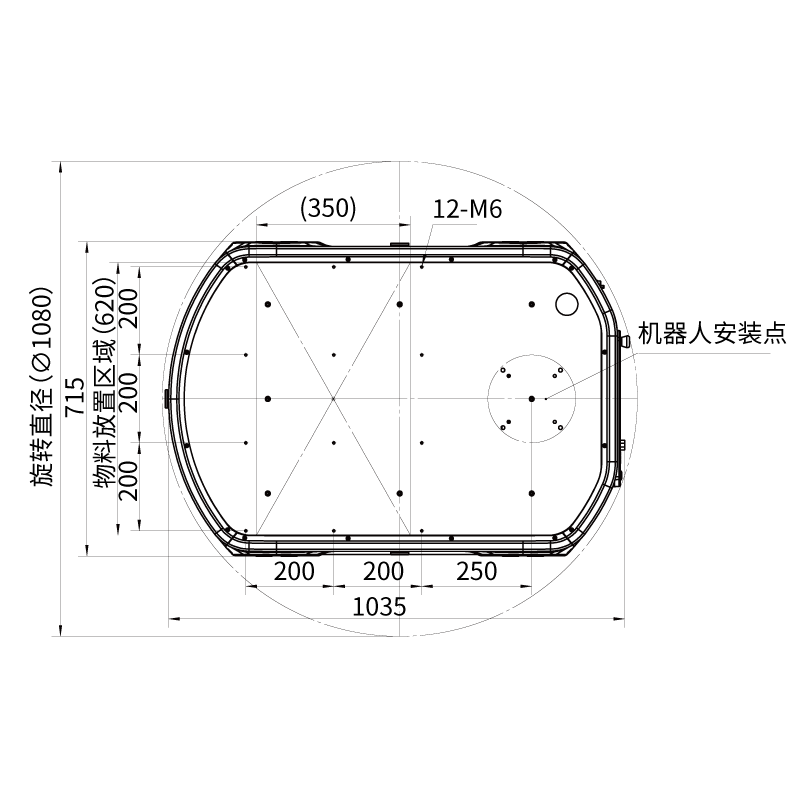
遨博海纳系列移动式协作机器人可灵活控制协作机器人、移动底盘、视觉、末端夹爪等设备。多合一控制系统带来了简单便捷、安全可靠、扩展灵活、高效协同的全场景交互体验,可以灵活适应各种工作环境,省却繁杂操作,通过手眼脚配合来完成各种复杂的工作任务。
了解更多+
-
- 行业应用
- 服务支持
-
遨博生态
-
以协作机器人本体为核心,生态产品为纽带,为客户提供即插即用的一站式解决方案,构建机器人产业生态的创新体系,协同上下游企业助推协作机器人行业的发展。
了解更多+
-
以协作机器人本体为核心,生态产品为纽带,为客户提供即插即用的一站式解决方案,构建机器人产业生态的创新体系,协同上下游企业助推协作机器人行业的发展。
了解更多+
-
以协作机器人本体为核心,生态产品为纽带,为客户提供即插即用的一站式解决方案,构建机器人产业生态的创新体系,协同上下游企业助推协作机器人行业的发展。
了解更多+
-
以协作机器人本体为核心,生态产品为纽带,为客户提供即插即用的一站式解决方案,构建机器人产业生态的创新体系,协同上下游企业助推协作机器人行业的发展。
了解更多+
-
- 遨博学院
- 联系我们
-
|
简体中文
 简体中文English
简体中文English -
 查找经销商
查找经销商